Leah (Seoyeon) Lee
Mechanical Engineering · University of Illinois at Urbana-Champaign, Expected graduation May 2027

My focus is on development of mechanical systems. I am especially interested in taking a design from concept to working hardware, such as designing parts, fabricating, testing performance, and refining the system based on measured results.
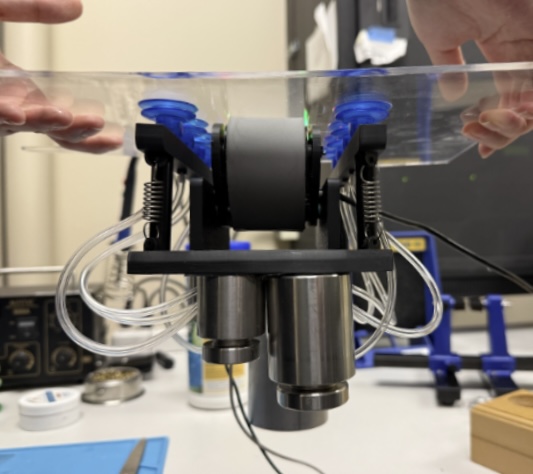
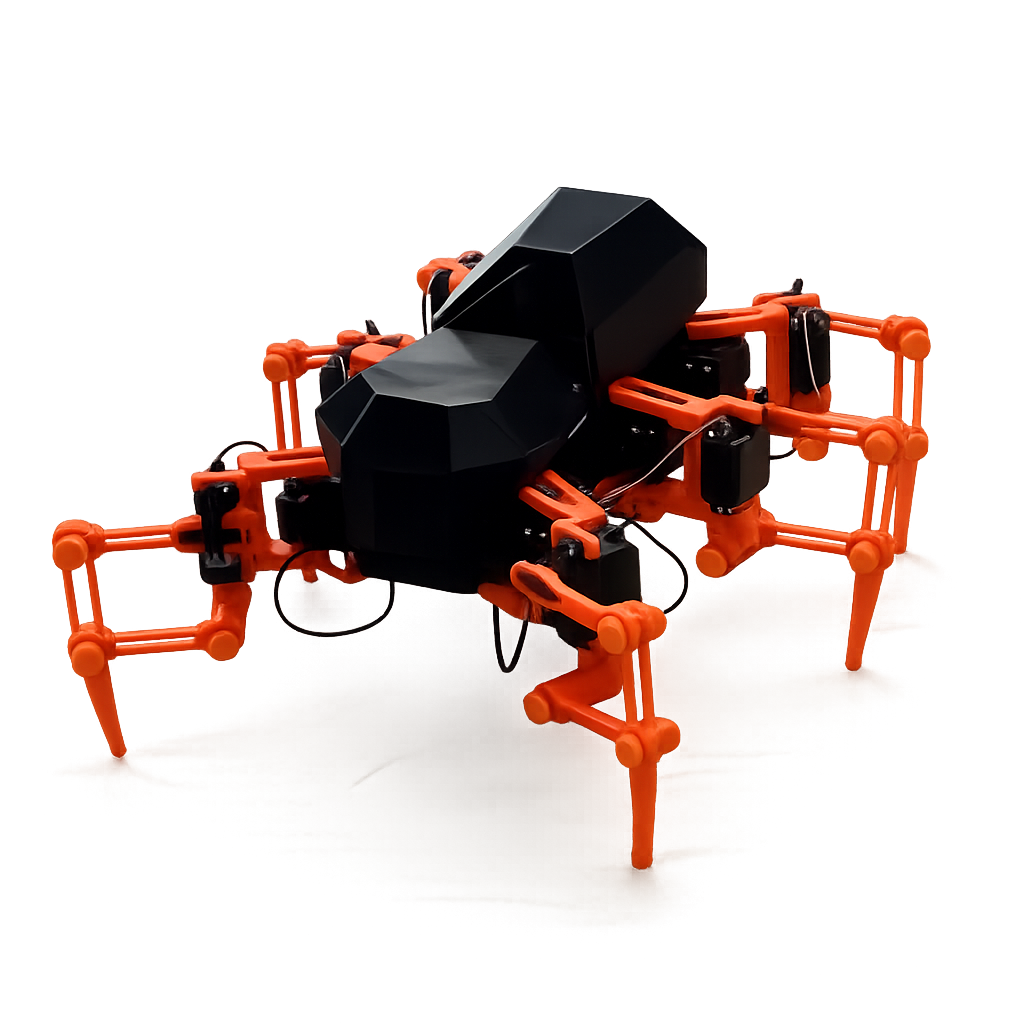
I work on two research projects. At the Novel Mobile Robots Lab, I develop a self-actuated climbing inspection robot, working on mechanism design, system integration, and experimental testing. At the RoboTouch Lab, I designed, fabricated, and tested GelSphere, with an under-review paper submitted to IROS 2026.
Publications
- In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026Submitted. * equal contribution
Projects
- Jan 2026 – May 2026
- Jun 2025 – Aug 2025